Venetian blinds¶
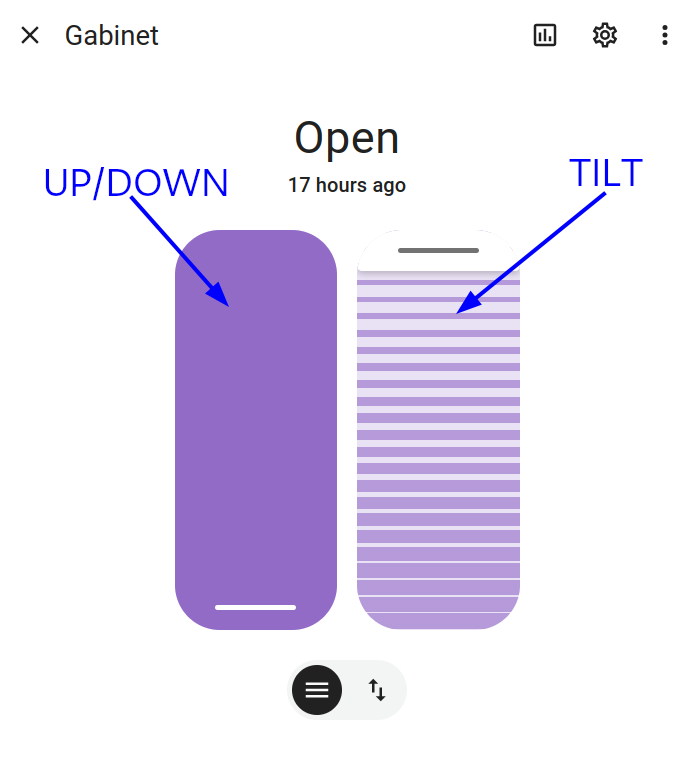
In Esphome covers doesn’t have tilt functions. Because of that we use custom component made by Vaclav (thanks for that!): https://github.com/bruxy70/Venetian-Blinds-Control It supports tilting. It’s called venetian blinds.
We use switch component for venetian blinds as only those support interlock.
Video what’s in this instruction¶

Example config snippet¶
switch:
- platform: gpio
id: cover_open_01_out01
pin:
pcf8574: pcf_left
number: 15
mode:
output: true
inverted: true
interlock: &cover_interlock_01 [cover_open_01_out01, cover_close_01_out02]
interlock_wait_time: 5ms
restore_mode: always off
User don’t need to edit that unless you want to edit interlock_wait_time.
Naming for outputs are:
- cover_open_01_out01
- cover_close_01_out02
- cover_open_02_out03
- cover_close_02_out04
- and go on…
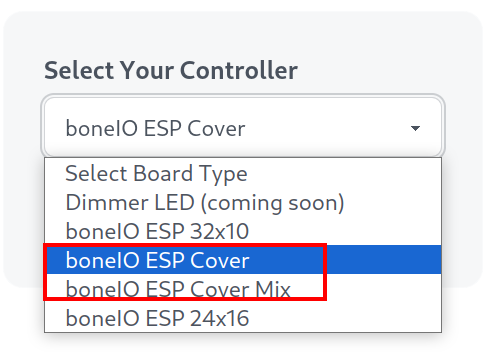
Install proper firmware¶
You have to install Cover (or Cover Mix) configuration from our website and adopt device in Esphome addon to get it working properly:
Recompile with custom component¶
Add this to the top of your adopted configuration
external_components:
- source:
type: git
url: https://github.com/bruxy70/Venetian-Blinds-Control
ref: master
components: [venetian_blinds]
Configure venetian blind¶
Always have venetian blind fully open when configuring first time!
We want to change Cover 01 to be venetian blind.
Put some safe long time to open and close your venetian blind (do it carefully! We’re not responsible for any damage made by you). Let’s say 60 seconds. Configure tilt duration in ms as it should be calibrate precisely.
cover:
- platform: venetian_blinds
name: 'Blind 01'
id: blind_01
open_action:
- switch.turn_on: cover_open_01_out01
open_duration: 60s
close_action:
- switch.turn_on: cover_close_01_out02
close_duration: 60s
tilt_duration: 2000ms
stop_action:
- switch.turn_off: cover_open_01_out01
- switch.turn_off: cover_close_01_out02
As you can see I edited platform, open_duration: 60s and close_duration: 60s to 60seconds.
Compile your firmware and upload it.
- Without power attached (turn off the fuse) open cover it in Home Assistant, so state of cover is synchronized between boneIO device and real state of cover.
- Prepare stopwatch.
- Now turn on power (turn on fuse)
- Click close and start stopwatch simultaneously
- When motor is stopped stop the stopwatch and note the closing time.
- Wait a few seconds (2 is ok) and stop cover in Home Assistant UI by clicking stop.
- Now let’s measure opening time. Click on open button and start stopwatch.
- Note tilting time without stopping the motor!
- When motor is stopped, stop the stopwatch and note the opening time.
- Ok, let’s power down the cover, edit open_duration time, close_duration time and tilting time.
- Compile firmware and compile it.
- Your venetian blind is ready.
Configure inputs¶
This config is provided by default in our firmware.
Open, close and tilt with 2 buttons¶
In this scenario single click will control tilt and long for at least 2s will open/close blind.
binary_sensor:
- platform: gpio
name: 'IN_01'
id: in_01
pin:
pcf8574: pcf_inputs_1to14
number: 0
mode:
input: true
inverted: true
on_multi_click:
- timing: #long click
- ON for at least 2s
then:
- lambda: |
auto call = id(blind_01).make_call();
if(id(blind_01).current_operation == COVER_OPERATION_IDLE){
call.set_command_open();
}
else {
call.set_command_stop();
}
call.perform();
- timing: #short click
- ON for at most 0.4s
- OFF for at least 0.1s
then:
- lambda: |
auto call = id(blind_01).make_call();
if (id(blind_01).current_operation == COVER_OPERATION_IDLE){
if (id(blind_01).tilt < 1.0){
float new_tilt = std::min(id(blind_01).tilt + 0.1f, 1.0f);
call.set_tilt(new_tilt);
}
}
else {
call.set_command_stop();
}
call.perform();
- platform: gpio
name: 'IN_02'
id: in_02
pin:
pcf8574: pcf_inputs_1to14
number: 1
mode:
input: true
inverted: true
on_multi_click:
- timing: #long click
- ON for at least 2s
then:
- lambda: |
auto call = id(blind_01).make_call();
if(id(blind_01).current_operation == COVER_OPERATION_IDLE){
call.set_command_close();
}
else {
call.set_command_stop();
}
call.perform();
- timing: #short click
- ON for at most 0.4s
- OFF for at least 0.1s
then:
- lambda: |
auto call = id(blind_01).make_call();
if (id(blind_01).current_operation == COVER_OPERATION_IDLE){
if (id(blind_01).tilt > 0.0){
float new_tilt = std::max(id(blind_01).tilt - 0.1f, 0.0f);
call.set_tilt(new_tilt);
}
}
else {
call.set_command_stop();
}
call.perform();